Nachdem meine ca. 8 Jahre alte Piper Arrow aus "noch ungeklärter Ursache" abgestürzt ist habe ich mir ein neues Modell, die BO 209 Monsun 2.20m von Graupner zugelegt
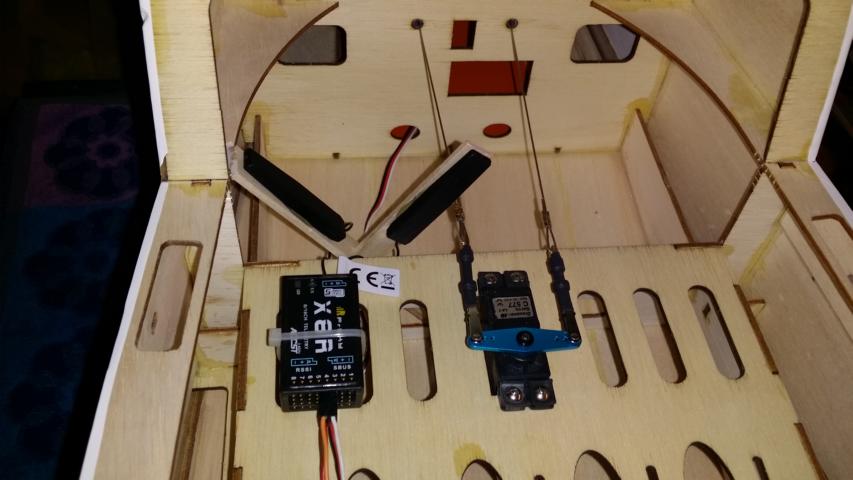
Das Modell wurde ordentlich verpackt und unbeschädigt geliefert. Zu meiner Überraschung waren sogar Taschen für Tragflächen, Seiten und Höhenruder dabei. Ich bestaunte gleich den riesigen Rumpf. Da ist reichlich Platz für Einbauten vorhanden. Als erstes klebte ich die Scharniere der Ruder ein montierte das Fahrwerk und begann mit dem Servoeinbau und den Anlenkungen. Dann bekam der Empfänger sein Plätzchen.

Der Motor stammt aus meiner alten Cessna Cardinal 182. Es ist ein Magnum 4-Takter mit 20ccm. Ich hoffe, dass die Leistung für das neue Modell ausreichend ist. Mit einigen Distanzstücken hat der Motor seine Position gefunden.
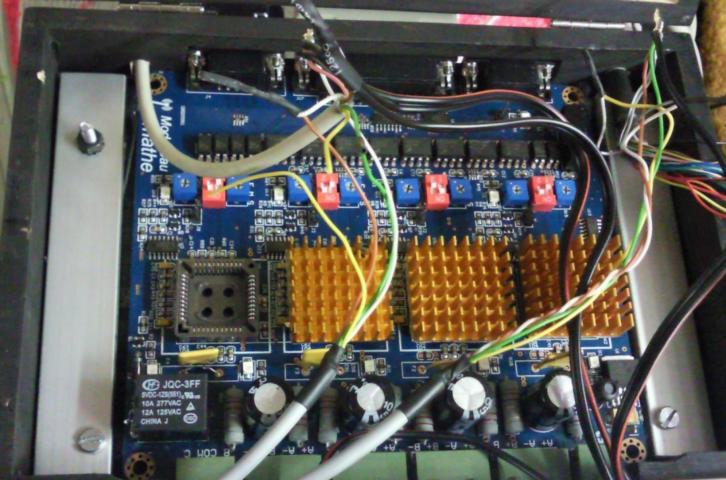
Für die Elektronik entschied ich mich ein extra Brettchen anzufertigen. Darauf werden die Stromversorgung (2x 5V 3A Regler), automatische Glühung, Lichtsteuerung und Spannungsüberwachung montiert. Später folgt noch ein Sprachmodul mit Funksprüchen.
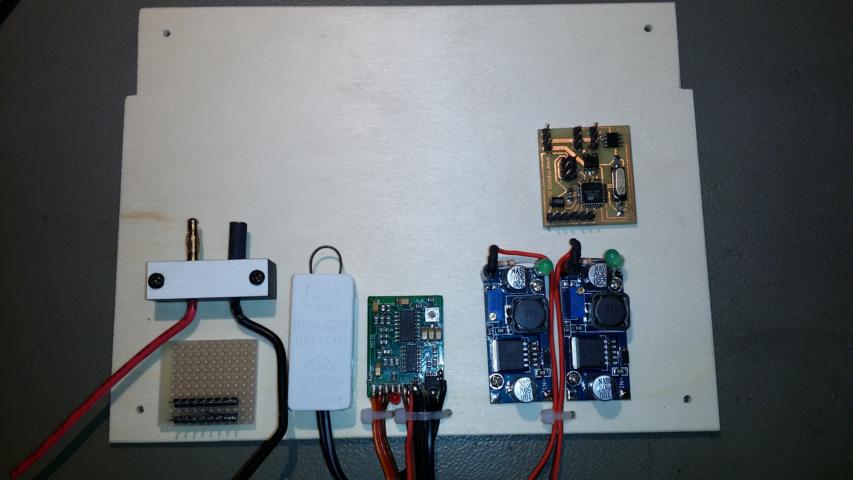


Elektronikmodul eingebaut und verkabelt. Gut zu erkennen ist die große Platine mit den Vorwiderständen zur Beleuchtung des Modells.
An den Tragflächenspitzen habe ich 2 LED´s mit je 1Watt für das Positionslicht und die Blitzer installiert.



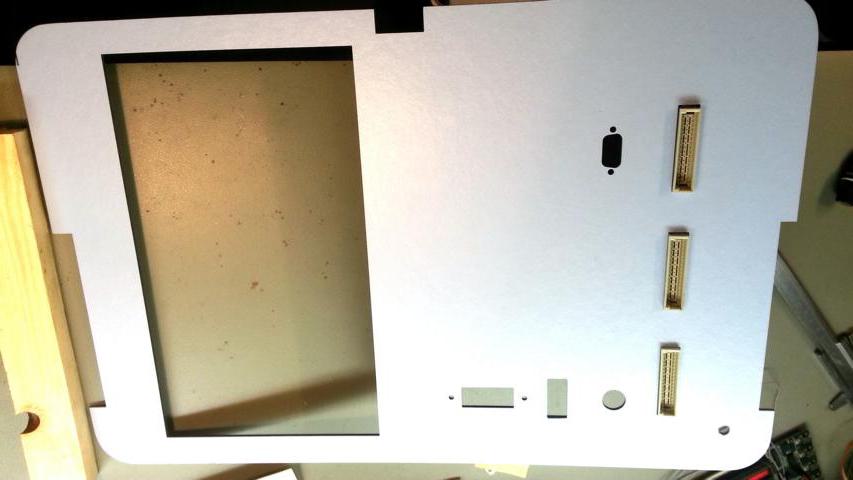
Um die Elektronik in den Tragflächen mit Strom zu versorgen, baute ich mir aus 9-poligen Sub-D Steckern eine federnde Verbindung zum Rumpf. Das hat den Vorteil, dass bei einem eventuell auftretenden Spalt zwischen Tragfläche und Rumpf die Verbindung nicht unterbrochen wird. Das ist sehr wichtig um die Servos der Querruder und Landeklappen (Licht unwichtig) immer steuern zu können.